Real-Time Kinematic (RTK) positioning is a technique used to enhance the accuracy of satellite navigation systems. Despite its widespread use, there is often confusion about how RTK accuracy is determined and why it changes with distance from the base station. The truth is, RTK accuracy is not a mysterious phenomenon; it is simply a function of math. By understanding the underlying calculations, users can better appreciate how accuracy is affected by distance and optimize their use of RTK systems accordingly.
The performance of RTK systems can be quantified by their horizontal and vertical accuracies as published by the receiver manufacturers. For this example, we’ll use the specifications of the Septentrio Mosaic-X5:
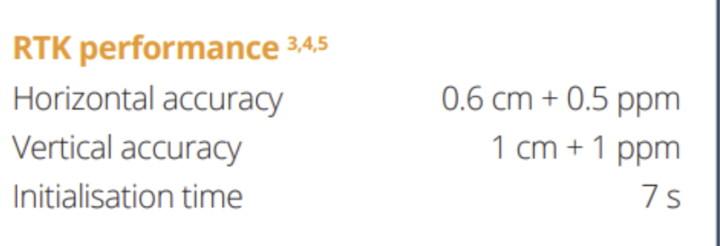
Do note that these specifications do vary with the manufacturer, and for your own analysis be sure to use the specs that apply to your equipment.
Understanding Parts Per Million (PPM) and Its Relation to Distance
Parts per million (ppm) is a unit of measurement used to describe the accuracy degradation in RTK positioning systems as the distance from the base station increases. In the context of RTK accuracy, 1 ppm equates to an error of 1 millimeter per kilometer. Therefore, if a system has a horizontal accuracy degradation of 0.5 ppm, it means that for every kilometer the rover moves away from the base station, an additional error of 0.5 millimeters is introduced.
. The formulae provided in the image allow us to calculate these variations:
- Horizontal Accuracy: Accuracy = 0.6 cm + 0.5 ppm × Distance
- Vertical Accuracy: Accuracy = 1.0 cm + 1.0 ppm × Distance
Horizontal Accuracy Analysis
The horizontal accuracy of RTK starts at 0.6 cm when the distance from the base station is zero. This base accuracy increases linearly with the distance due to the 0.5 ppm factor. For instance, at a distance of 10 km (10,000 meters), the additional error is 0.5ppm × 10KM = .5cm, making the total horizontal accuracy 0.6cm + 0.5cm = 1.1 cm.
Vertical Accuracy Analysis
Similarly, the vertical accuracy starts at 1.0 cm and increases by 1.0 ppm per kilometer. At the same distance of 10 km, the additional error is 1ppm X 10KM = 1cm, resulting in a total vertical accuracy of 1.0cm + 1.0cm = 2.0 cm.
Graphical Representation
To illustrate these accuracy changes, we plotted the accuracy against distances up to 50 km:

The graph shows how both horizontal and vertical accuracies degrade with increasing distance. The horizontal accuracy remains better than the vertical accuracy, but both follow a similar trend of linear degradation.
Practical Implications
The degradation in accuracy with distance implies that RTK systems are most effective when the rover is relatively close to the base station. For applications requiring extremely high precision in the 1cm range such as construction and high-precision agriculture, it is crucial to maintain a shorter distance from the base station, typically around 10km. For applications requiring high precision in the 2-3cm range, this distance can be extended to 50km.
In conclusion, understanding the relationship between distance and RTK accuracy is essential for optimizing the use of RTK systems in various applications. The graph and calculations provided offer a clear visualization of how accuracy degrades with distance, helping users plan their operations more effectively.